Pipeline Overview
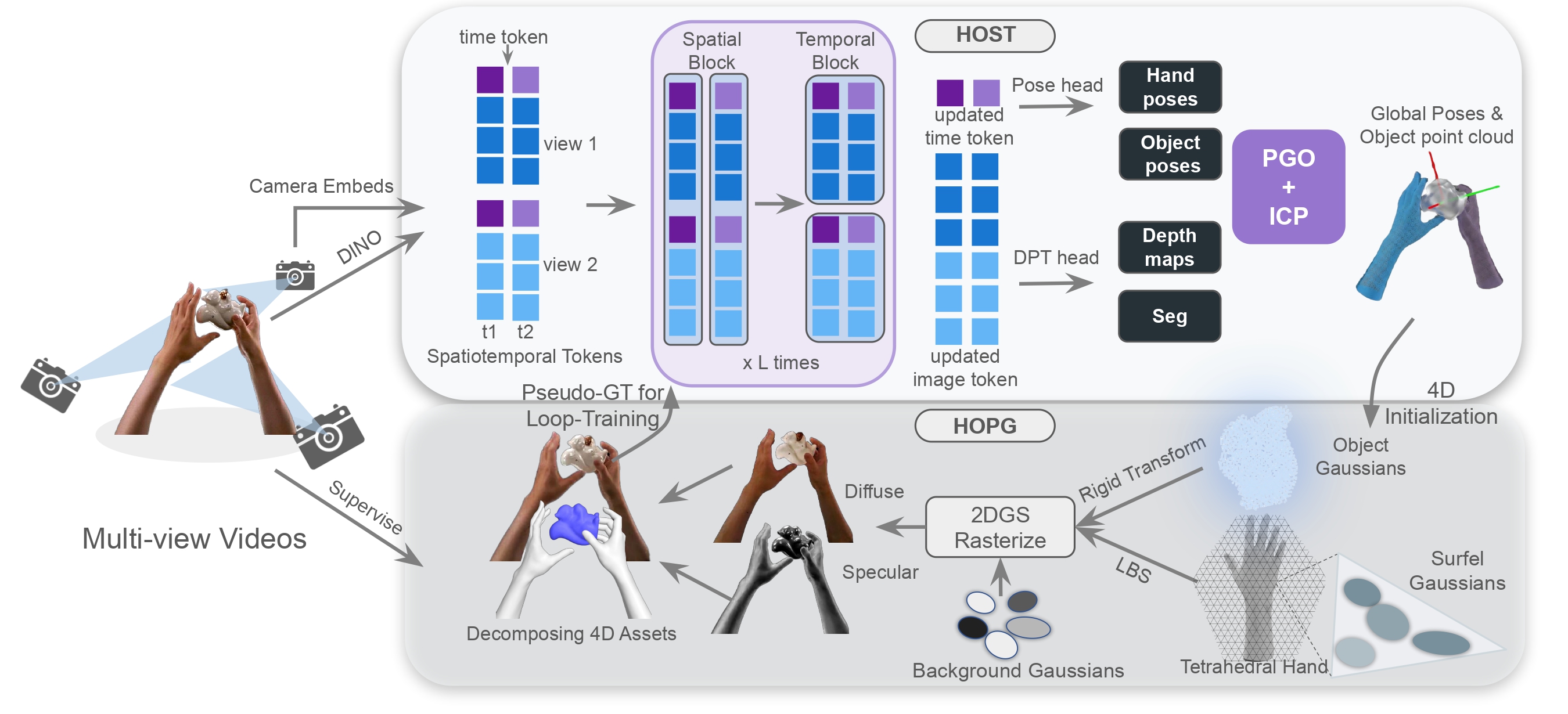
Our pipeline operates in two stages. First, the Hand Object Spatiotemporal Transformer (HOST) processes multi-view videos to robustly regress parametric hand/object poses, dense object point clouds, and segmentation masks, yielding a metric 3D initialization. Second, the Hand Object Physics-aware Gaussian (HOPG) module leverages this initialization to optimize a hybrid 2D Gaussian representation. By enforcing structural constraints and explicitly decoupling diffuse and specular appearance, HOPG effectively prevents illumination bake-in.